Servo-macaz
4 October 2017
No Comment
16,623 vizualizări

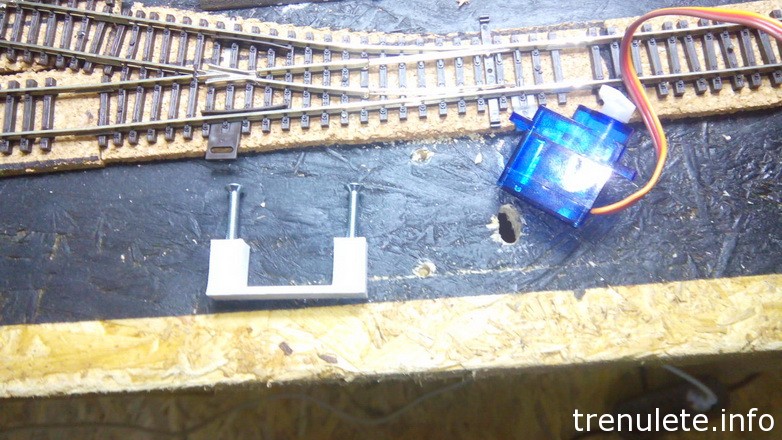
Am inceput montarea motoarelor de macaz facute din servo.
De data aceasta, beneficiind de controlul digital al miscarii servoului, mi-am permis o legatura directa a bratului cu bara de ac a macazului.
Pentru a fixa servo sub masa, am proiectat si printat un suport simplu, care sa tina mecanismul fixat de masa cu doua suruburi.
Legatura cu acul se face cu o sarma de nichelina, destul de dura ca sa nu se indoaie, dar suficioent de elastica pentru a prelua din excesul de miscare.
Oricum, viteza si distanta se va regla perfect din circfuitul arduino.
Pentru trecerea echei an practicat gauri de 3 mm diametru alungite cu bormasina la 8 mm.
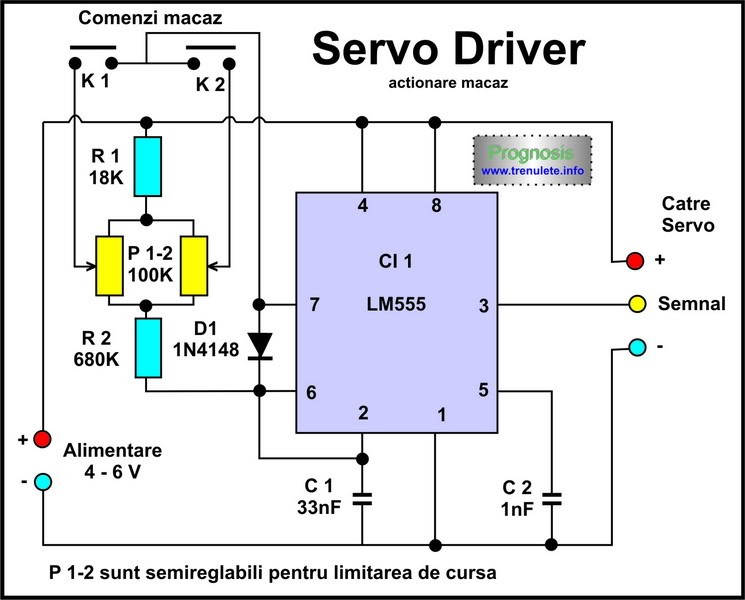
Macazele vor fi actionate dupa schema prezentata!














Leave a response!